

 دانلود جزوه مخابرات 1 دانشگاه امیرکبیر استاد داور
دانلود جزوه مخابرات 1 دانشگاه امیرکبیر استاد داور دانلود رایگان نمونه سوالات تخصصی استخدامی مهندسی برق همراه با جواب pdf
دانلود رایگان نمونه سوالات تخصصی استخدامی مهندسی برق همراه با جواب pdf پی سی بی آژیر 30 وات دزدگیر
پی سی بی آژیر 30 وات دزدگیر دانلود جزوه DSP پردازش سیگنال دیجیتال دانشگاه خواجه نصیر استاد محامدپور
دانلود جزوه DSP پردازش سیگنال دیجیتال دانشگاه خواجه نصیر استاد محامدپور بررسی تخصصی مدارات CMOS با استفاده از نرم افزار Cadence IC Design
بررسی تخصصی مدارات CMOS با استفاده از نرم افزار Cadence IC Design نمونه سوالات مدارهای الکتریکی 1 + پاسخ تشریحی
نمونه سوالات مدارهای الکتریکی 1 + پاسخ تشریحی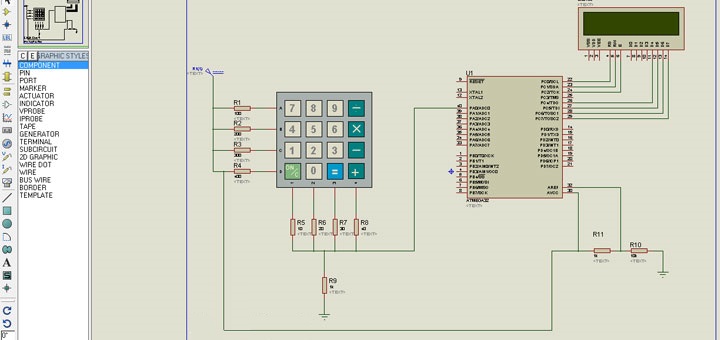 اتصال کیپد به میکرو فقط با یک سیم
اتصال کیپد به میکرو فقط با یک سیم مطالعه روشهای تلفیق داده در سیستم ناوبری ترکیبی INS/GNSS
مطالعه روشهای تلفیق داده در سیستم ناوبری ترکیبی INS/GNSS شناسایی سیستم به روش آنالیز طیفی با کد نویسی در متلب و مقایسه آن با کد دستوری spa
شناسایی سیستم به روش آنالیز طیفی با کد نویسی در متلب و مقایسه آن با کد دستوری spa تحقیق درباره فناوری ترموالكتريك
تحقیق درباره فناوری ترموالكتريك دانلود جزوه کنترل مدرن دانشگاه خواجه نصیر
دانلود جزوه کنترل مدرن دانشگاه خواجه نصیر انواع خازن
انواع خازن

تاثیر شیارهای استاتور و روتور بر پارامترهای الکتریکی ماشین (با اعمال خطای سیم پیچ سه فاز)....چکيده: در اين پايان نامه ابتدا عيوب الكتريكي و مكانيكي در ماشينهاي الكتريكي بررسي گرديده و عوامل به وجود آورنده و روشهاي رفع اين عيوب بيان شده است. به دنبال آن، به كمك روش تابع سيم پيچي ماشين شبيه سازي و خطاي مورد نظر يعني خطاي سيم بندي استاتور به آن اعمال و نتايج مورد بررسي قرار داده شده است. پارامتر اصلي كه براي تشخيص خطا در اين پايان نامه استفاده كرده ايم، جريان سه فاز استاتور در حالت سالم و خطادار، تحت بارگذاري هاي مختلف خواهد بود. سپس اثر شیارهای استاتور و روتور بر رفنار ماشین القایی با تابع فاصله هوای معکوس به شکل واقعی خود مورد استفاده قرار میگیرد. سپس چگونگی اعمال اثر شیارهای استاتور و روتور در روش تابع سيم پيچ بیان شده و نحوی محاسبه ماتریسهای اندوکتانس خودی و متقابل استاتور و روتورو ماتریسهای مشتق اندوکتانس با وجود شیارهای استاتور و روتور در چهار حالت مورد بررسی قرار میگیرد. سپس اعمال خطاي سيم بندي استاتور بااثر شیارهای استاتور و روتور مورد بررسی قرار میگیرد و در نهایت نتایج بدست آمده با هم مقایسه میشود. با توجه به مطالب اشاره شده نتيجه مي شود كه با تشخيص به موقع هر كدام از عيوب اوّليه در ماشين القايي مي توان از پديد آمدن حوادث ثانويّه كه منجر به وارد آمدن خسارات سنگين مي گردد، جلوگيري نمود. در اين راستا سعي شده است كه با تحليل، بررسي و تشخيص يكي از اين نمونه خطاها، خطاي سيم بندي استاتور يك موتور القايي قفس سنجابي، گامي موثر در پياده سازي نظام تعميراتي پيشگويي كننده برداشته شود و با بكارگيري سيستم هاي مراقبت وضعيت بروي چنين ماشينهايي از وارد آمدن خسارات سنگين بر صنايع و منابع ملي جلوگيري گردد. فهرست مطالب 1-2- بررسي انواع تنشهاي وارد شونده بر ماشين القايي. 3 1-2-1- تنشهاي موثر در خرابي استاتور. 3 1-2-2- تنشهاي موثر در خرابي روتور. 4 1-3 – بررسي عيوب اوليه در ماشين هاي القايي. 7 1-3-1- عيوب الكتريكي اوليه در ماشينهاي القايي. 8 1-3-2 عيوب مكانيكي اوليه در ماشينهاي القايي. 14 فصل دوممبانی نظری و پیشینه تحقیق 3-2-مروری بر تحقیقات گذشته. 19 3-2-2- محاسبه اندوکتانسهاي ماشين با استفاده از توابع سيم پيچ 31 3-3- شبيه سازي ماشين القايي. 34 3-3-1- معادلات يک ماشين الکتريکي با m سيم پيچ استاتور و n سيم پيچ روتور. 36 3-3-1-1- معادلات ولتاژ استاتور. 36 3-3-1-2- معادلات ولتاژ روتور. 37 2-3-1-3- محاسبه گشتاور الکترومغناطيسي. 38 3-3-1-4- معادلات موتور القاي سه فاز قفس سنجابي در فضاي حالت 39 3-4- نتایج شبیه سازی ماشین القایی سالم. 43 3-5- مدلسازي خطاي حلقه به حلقه و خطاي كلاف به كلاف. 45 3-6-نتایج شبیه سازی ماشین القایی در اثر خطای سیم پیچ در شیارهای استاتور. 48 فصل چهارمتجزیه و تحلیل یافته ها 4-2- محاسبه ماتریس اندوکتانس ... 53 4-3- محاسبه ماتریس اندوکتانس ... 54 4-4- محاسبه ماتریس اندوکتانس ..... 54 4-6- نتایج شبیه سازی ماشین القایی سالم. 58 7-4- نتایج شبیه سازی ماشین القایی در اثر خطای سیم پیچ در شیارهای استاتور. 60 فصل پنجمنتیجه گیری و پیشنهادات فهرست شکل ها شکل1- 1موتور القايي با ساختار مجزا شده از هم. 8 شکل1- 2شماي قسمتي از موتور و فركانس عبور قطب. 9 شکل1- 3 (الف) اتصال كوتاه كلاف به كلاف بين نقاط a , b(ب) خطاي فاز به فاز. 13 .شکل3- 1برشي از وسيله دو استوانه اي با قرار گيري دلخواه سيم پيچ در فاصله هوايي. 28 شکل3- 2تابع دور کلاف متمرکز با N دور هادي مربوط به شکل 3-1 29 شکل3- 3تابع سيم پيچ کلاف متمرکز N دوري مربوط به شکل 3-1. 31 شکل3- 4ساختار دو سيلندري با دور سيم پيچ A وB.. 31 شکل3- 5تابع دور کلاف BB΄ شکل 3-4. 32 شکل3- 6(الف) تابع دور فاز a استاتور(ب) تابع سيم پيچ فاز a استاتور. 34 شکل3- 7تابع سيم پيچي حلقه اول روتور. 35 شکل3- 8 (الف) اندوکتانس متقابل بين فاز Aاستاتور و حلقه اول روتور 35 شکل3- 9شكل مداري در نظر گرفته شده براي روتور قفس سنجابي[40] 37 شکل3- 10روندنماي برنامه شبيهسازي ماشين القايي قفس سنجابي سه فازبا فرض هسته ايده آل. 43 شکل3- 11شکل موج جریان فاز A.. 44 شکل3- 12فرم سيم بندي استاتور وقتي كه اتصال كوتاه داخلي اتفاق افتاده است. 46 شکل3- 13منحنی گشتاور ماشین. 50 .شکل4- 1ورقه هسته و شیارهای موجود بر آن در موتور القایی قفس سنجابی 11 kW... 52 شکل4- 2تابع فاصله هوایی معکوس با در نظر گرفتن شیارها. 52 شکل4- 3تغییرات اندوکتانس خودی فاز a استاتور نسبت به موقعیت روتور 57 شکل4- 4با در نظر گرفتن اثر شیار برای استاتور، منحنی اندوکتانس 57 شکل4- 5با اعمال اثر شیارهای روتور و محاسبه اندوکتانس. 58 شکل4- 6با اعمال اثر شیارهای روتور و محاسبه اندوکتانس. 58 شکل4- 7شکل موج جریان فاز A.. 59 شکل4- 8جریان ماشین در خطای حلقه به حلقه در حالت راه اندازی و بدون بار. 60 شکل4- 10منحنی گشتاور ماشین. 61 فهرست نمودارها نمودار3- 1نمودار سرعت ماشین بر حسب زمان. 44 نمودار3- 2نمودار گشتاوری ماشین. 45 نمودار3- 3جریان ماشین در خطای حلقه به حلقه در حالت راه اندازی و بدون بار. 49 نمودار3- 4منحنی سرعت ماشین. 49 .نمودار4- 1سرعت ماشین بر حسب زمان. 59 نمودار4- 2عملکرد گشتاوری ماشین. 60 مقدمه: موتورهاي الکتريکي نقش مهمي را در راه اندازي موثر ماشينها و پروسه هاي صنعتي ايفا مي کنند. بخصوص موتورهاي القايي قفس سنجابي را که بعنوان اسب کاري صنعت مي شناسند. بنابراين تشخيص خطاهاي اين موتورها مي تواند فوايد اقتصادي فراواني در پي داشته باشد. از جمله مديريت کارخانه هاي صنعتي را آسان مي کند، سطح اطمينان سيستم را بالا مي برد، هزينه تعمير و نگهداري پايين مي آيد و نسبت هزينه به سود بطور قابل توجهي کاهش مي يابد. Bonnett وSouk up براي خرابيهاي استاتور موتورهاي القايي سه فاز قفس سنجابي، پنج حالت خرابي مطرح کردهاند که عبارت اند از: حلقه به حلقه، کلاف به کلاف، قطع فاز، فاز به فاز و کلاف به زمين[1]. براي موتورهاي قفس سنجابي، خرابيهاي سيم پيچي استاتور و ياتاقانها کل خرابيها به حساب مي آيند و همچنين اکثر خرابيهاي سيم پيچي استاتور موتور القايي از فروپاشي عايقي حلقه به حلقه ناشي مي شود.[2] برخي از محققين خرابيهاي موتور را چنين تقسيم بندي کرده اند: خرابي ساچمه ها ( ياتاقانها) %40-50، خرابي عايق استاتور %30-40 و خرابي قفسه روتور %5- 10 [3] که اگر خرابي حلقه به حلقه جلوگيري نشود، منجر به خطاي فاز به زمين يا فاز به فاز مي گردد، که خطاي فاز به زمين شديد تر است. در مقالات[4] [5] نظريه تابع سيم پيچي و کاربرد آن در آناليز گذرای موتورهاي القايي تحت خطا شرح داده شده است. از اين نظريه در مدلسازي خطاي حلقه به حلقه استاتور استفاده شده است. علاوه بر روشهاي فوق خطاي استاتور موتور القايي را مي توان به کمک بردارهاي فضايي مورد مطالعه قرار داد[6]. فصل اول کلیات تحقیق1-1- مقدمه:[7] خرابيهاي يك موتور قفس سنجابي را مي توان به دو دسته الكتريكي و مكانيكي تقسيم كرد.هر كدام از اين خرابيها در اثر عوامل و تنش هاي متعددي ايجاد مي گردند. اين تنشها در حالت كلي بصورت حرارتي، مغناطيسي، ديناميكي، مكانيكي و يا محيطي مي باشند كه در قسمت هاي مختلف ماشين مانند محور، بلبرينگ، سيم پيچي استاتور ، ورقه هاي هسته روتور واستاتور و قفسه روتور خرابي ايجاد ميكنند. اكثر اين خرابيها در اثر عدم بكارگيري ماشين مناسب در شرايط كاري مورد نظر، عدم هماهنگي بين طراح و كاربر و استفاده نامناسب از ماشين پديد ميآيد. در اين قسمت سعي گرديده است ابتدا انواع تنشهاي وارده بر ماشين، عوامل پديد آمدن و اثرات آنها بررسي گردد. قبل از بررسي انواع تنشهاي وارده بر ماشين القايي بايستي موارد زير در نظر گرفته شود : 1- با مشخص كردن شرايط كار ماشين مي توان تنشهاي حرارتي، مكانيكي و ديناميكي را پيش بيني نمود و ماشين مناسب با آن شرايط را انتخاب كرد. به عنوان مثال ، سيكل كاري ماشين و نوع بار آن ، تعداد دفعات خاموش و روشن كردن و فاصله زماني بين آنها ، از عواملي هستند كه تاثير مستقيم در پديد آمدن تنشهاي وارده بر ماشين خواهند داشت. 2- وضعيت شبكه تغذيه ماشين از لحاظ افت ولتاژ در حالت دائمي و شرايط راه اندازي و ميزان هارمونيكهاي شبكه هم در پديد آمدن نوع تنش و در نتيجه پديد آمدن خرابي در ماشين موثر خواهند بود. 1-2- بررسي انواع تنشهاي وارد شونده بر ماشين القايي:1-2-1- تنشهاي موثر در خرابي استاتور:[1.7]الف ـ تنشهاي گرمايي :اين نوع از تنشها را مي توان ناشي از عوامل زير دانست: ◄ سيكل راه اندازي: افزايش حرارت در موتورهاي القايي بيشتر هنگام راه اندازي و توقف ايجاد ميشود. يك موتور در طول راه اندازي، پنج تا هشت برابر جريان نامي از شبكه جريان مي كشد تا تحت شرايط بار كامل راه بيفتد. بنابراين اگر تعداد راه اندازي هاي يك موتور در پريود كوتاهي از زمان زياد گردد دماي سيم پيچي به سرعت افزايش مي يابد در حالي كه يك موتور القايي يك حد مجاز براي گرم شدن دارد و هرگاه اين حد در نظر گرفته نشود آمادگي موتور براي بروز خطا افزايش مي يابد. تنشهايي كه بر اثر توقف ناگهاني موتور بوجود مي آيند به مراتب تاثير گذارتر از بقيه تنشها هستند. ◄ اضافه بار گرمايي: بر اثر تغييرات ولتاژ و همچنين ولتاژهاي نامتعادل دماي سيم پيچي افزايش مي يابد. بنابر يك قاعده تجربي بازاي هر %2/1-3 ولتاژ فاز نامتعادل دماي سيم پيچي فاز با حداكثر جريان خود، 25% افزايش پيدا مي كند . ◄ فرسودگي گرمايي: طبق قانون تجربي با ºc10 افزايش دماي سيم پيچي استاتور عمر عايقي آن نصف مي شود. بنابراين اثر معمولي فرسودگي گرمايي ، آسيب پذيري سيستم عايقي است. ب ـ تنشهاي ناشي از كيفيت نامناسب محيط كار : عواملي كه باعث ايجاد اين تنشهامي شود به صورت زير است:
ج ـ تنشهاي مكانيكي: عواملي كه باعث ايجاد اين تنشها مي شوند به صورت زير مي باشند: ◄ ضربات روتور: برخورد روتور به استاتور باعث مي شود كه ورقه هاي استاتور عايق كلاف را از بين ببرد و اگر اين تماس ادامه داشته باشد نتيجه اين است كه كلاف در شيار استاتور خيلي زود زمين ميشود و اين به دليل گرماي بيش از حد توليد شده در نقطه تماس مي باشند. ◄ جابجايي كلاف: نيرويي كه بر كلافها وارد مي شود ناشي از جريان سيم پيچي است كه اين نيرو متناسب با مجذور جريان می باشد ( F∝). اين نيرو هنگام راه اندازي ماكزيمم مقدار خودش را دارد و باعث ارتعاش كلافها با دو برابر فركانس شبكه و جابجايي آنها در هر دو جهت شعاعي و مماسي ميگردد. 1-2-2- تنشهاي موثر در خرابي روتور :الف ـ تنشهاي گرمايي: عواملي كه باعث ايجاد اين نوع تنشها در روتور مي شود به صورت زير است: ◄ توزيع غير يكنواخت حرارت: اين مسئله اغلب هنگام راه اندازي موتور اتفاق مي افتد اما عدم يكنواختي مواد روتور ناشي از مراحل ساخت نيز ممكن است اين مورد رابه وجود آورد. راه اندازي هاي مداوم و اثر پوستي، احتمال تنشهاي حرارتي در ميله هاي روتور را زيادتر مي كنند. ◄جرقه زدن روتور: در روتورهاي ساخته شده عوامل زيادي باعث ايجاد جرقه در روتور ميشوند كه برخي براي روتور ايجاد اشكال نميكنند(جرقه زدن غير مخرب) و برخي ديگر باعث بروز خطا مي شوند(جرقه زدن مخرب ). جرقه زدنهاي غير مخرب در طول عملكرد نرمال[2] موتور و بيشتر در هنگام راه اندازي رخ ميدهد . ◄ نقاط داغ و تلفات بيش از اندازه : عوامل متعددي ممكن است باعث ايجاد تلفات زيادتر و ايجاد نقاط داغ شوند. آلودگي ورقه هاي سازنده روتور يا وجود لكه بر روي آنها، اتصال غير معمول ميله هاي روتور به بدنه آن، فاصله متغير بين ميله ها و ورقة روتور و غيره مي تواند در مرحله ساخت موتور به وجود آيد. البته سازندگان موتور، آزمايشهاي خاصي مانند اولتراسونيك را براي كاهش اين اثرات بكار ميبرند. ب ـ تنشهاي مغناطيسي: عواملي مختلفي باعث ايجاد اين تنشها بر روي روتور مي شوند همانند، عدم تقارن فاصله هوايي و شارپيوندي شيارها، كه اين عوامل و اثرات آنها در زير مورد بررسي قرار داده شده است: ◄ نويزهاي الكترومغناطيسي : عدم تقارن فاصله هوايي، علاوه بر ايجاد يك حوزه مغناطيسي نامتقارن باعث ايجاد مخلوطي از هارمونيكها در جريان استاتور و به تبع آن در جريان روتور مي گردد. اثرات متقابل هارمونيكهاي جريان، باعث ايجاد نويز يا ارتعاش در موتور مي شوند. اين نيروها اغلب از نا همگوني فاصله هوايي بوجود ميآيند ◄ كشش نا متعادل مغناطيسي: كشش مغناطيسي نامتعادل باعث خميده شدن شفت روتور و برخورد به سيم پيچي استاتور مي شود. در عمل روتورها به طور كامل در مركز فاصله هوايي قرار نميگيرند. عواملي همانند، گريز از مركز[3]، وزن روتور، سائيدگي يا تاقانها و ... همگي بر قرار گيري روتور دورتر از مركز اثر مي گذارند. ◄ نيروهاي الكترومغناطيسي: اثر شار پيوندي شيارها ناشي از عبور جريان از ميله هاي روتور، سبب ايجاد نيروهاي الكتروديناميكي مي شوند. اين نيروها با توان دوم جريان ميله( ) متناسب و يكطرفه ميباشند و جهت آنها به سمتي است كه ميله را به صورت شعاعي از بالا به پائين جابجا مي كند. اندازه اين نيروهاي شعاعي به هنگام راه اندازي بيشتر بوده و ممكن است به تدريج باعث خم شدن ميله ها از نقطه اتصال آنها به رينگهاي انتهايي گردند. ج ـ تنشهاي ديناميكي: اين تنشها ارتباطي به طراحي روتور ندارند بلكه بيشتر به روند كار موتورهاي القايي بستگي دارند. برخي از اين تنشها در ذيل توضيح داده ميشود:
د ـ تنشهاي مكانيكي: برخي از مهمترين خرابي هاي مكانيكي عبارتنداز:
هـ ـ تنشهاي محيطي : همانند استاتور تنشهاي محيطي مختلفي، مي تواند بر روي روتور تاثير گذار باشد همانند رطوبت، مواد شيميايي، مواد خارجي و غيره 1-3 – بررسي عيوب اوليه در ماشين هاي القايي : [8و7]در اين قسمت، عيوب و خطاهايي كه ممكن است در يك ماشين القايي پديد آيد بررسي گرديده و عوامل بوجود آورنده آنها و تا حدودي تشخيص اين خطاها مورد مطالعه قرار گرفته اند . عيوب به دو دسته، خطاهاي الكتريكي و مكانيكي تقسيم بندي شده اند البته ممكن است خطاهايي در اثر پديد آمدن هر دو نوع عيب الكتريكي و مكانيكي رخ دهد . در حالت كلي خطاهاي بسيار مهمي كه در يك ماشين الكتريكي مي تواند اتفاق بيفتد به شرح ذيل است :
اين خطاها به وسيله يك يا چند تا از عواملي كه در زير آورده شده است مي تواند ايجاد شوند .
روشهاي تشخيص، جهت خطاهايي كه در بالا گفته شد ، مستلزم انواع مختلفي از علوم و تكنولوژي ها است كه برخي از اين روشهاي تشخيص در زير آمده است .
شكل ( 1-1 ) يك موتور القايي كه قسمتهاي مختلف آن از يكديگر مجزا شده است را نشان مي دهد. خطاهايي كه در بالا گفته شد در اين قسمتها ايجاد و گسترش مي يابند . [2]- عملکرد نرمال تعريف مي شود به صورت هر موتوري که در معرض افت ولتاژ، تغيير بار (نوسانات بار)، اغتشاشات سوئيچينگ و غيره قرارمي گيرد. [6]- Irregularities [8]- Search coils |
برچسب های مهم
قم , خیابان انقلاب , کوچه 41 پلاک 15





